数学(Math)解决方案
重要通知
。
基本概况
LaTeX 数学公式
$$ \log_a 1 = 0 $$
$$ x=y+1 $$
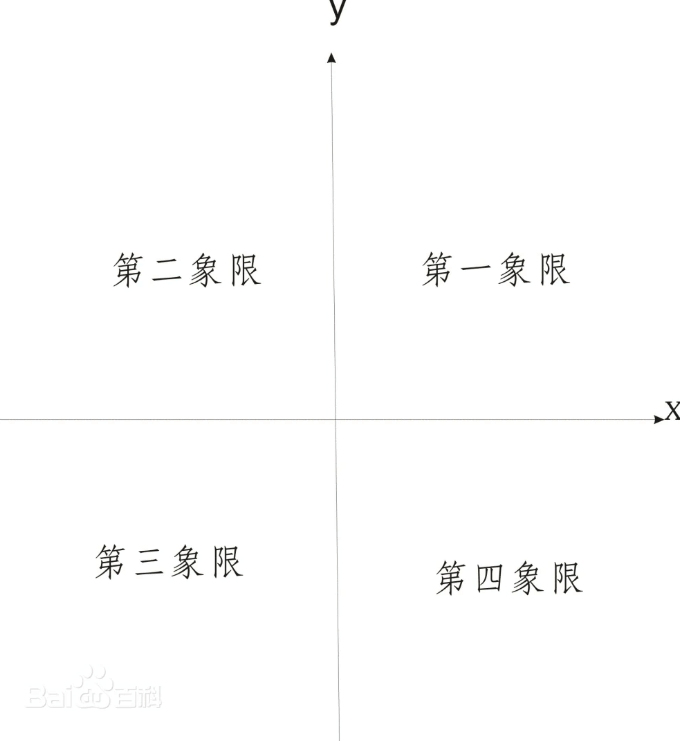
象限
象限(Quadrant),是平面直角坐标系(笛卡尔坐标系)中里的横轴和纵轴所划分的四个区域,每一个区域叫做一个象限。象限以原点为中心,x,y轴为分界线。右上的称为第一象限,左上的称为第二象限,左下的称为第三象限,右下的称为第四象限。原点和坐标轴上的点不属于任何象限。
坐标
记(x, y)是象限中的一点。
- 第一象限中的点:x > 0, y > 0。
- 第二象限中的点:x < 0, y > 0。
- 第三象限中的点:x < 0, y < 0。
- 第四象限中的点:x > 0, y < 0。
三角函数
对数
定义:对数公式是数学中的一种常见公式,如果a^x=N(a>0,且a≠1),则x叫做以a为底N的对数,记做x=log(a)(N),其中a叫做对数的底,N叫做真数。
度(degree)与弧度(radian)的换算
# 弧长 L
# 半径 R
# 度 A 单位 n°
# 弧度 F 单位:rad
# 根据度计算弧度的值
F = L/R = (π/180°)*A
# 根据弧度计算度的值
A = F / (π/180°)
# 基本公式
1° = π/180° * 1rad
1rad = 180°/π
45° = π/4 * 1rad
90° = π/2 * 1rad
180° = π * 1rad
几何图形
线段
二次贝塞尔曲线
三次贝塞尔曲线
二次贝塞尔曲线需要两个点。第一个点是用于二次贝塞尔计算中的控制点,第二个点是曲线的结束点。曲线的开始点是当前路径中最后一个点。
圆弧
圆上任意两点间的部分叫做圆弧,简称弧。
圆
在一个平面内,围绕一个点并以一定长度为距离旋转一周所形成的封闭曲线叫作圆(Circle),全称圆形。
圆弧上某点坐标计算
在计算圆弧上某点的坐标时,需要知道圆心的坐标、半径的长度以及该点所对应的弧度或角度。假设圆心的坐标为(x₀,y₀),半径的长度为r,弧度为θ。我们需要求解的点的坐标为(x,y)。
# 计算x轴坐标
x = x₀ + r * cos(θ);
# 计算y轴坐标
y = y₀ + r * sin(θ);
三角形
四边形
多边形
线性代数
数理统计
Sylvester
Sylvester 是一个用于 JavaScript 的向量、矩阵和几何库,它包括用于对任意维数的向量和矩阵进行建模,以及用于对 3 维空间中的无限线和平面进行建模的类。
- 官网:http://sylvester.jcoglan.com/
- 参考文档:http://sylvester.jcoglan.com/docs.html
mathlab
旨在成为 JavaScript 中最好的矩阵实验室。
- GitHub:https://github.com/timqian/mathlab
- NPM:https://www.npmjs.com/package/mathlab
- API:https://timqian.com/mathlab/
代码示例
import {
Complex, Sparse, abs, acos, add, and, asin, atan, atan2, band, bnot, bor, bxor, ceil, clone, cos, det, diag, dim,
div, dot, eig, epsilon, eq, exp, floor, geq, getBlock, getDiag, gt, identity, inv, leq, linspace, log, lshift, lt,
mod, mul, neg, negtranspose, neq, norm2, norm2Squared, not, or, pointwise, pointwise2, pow, random, reciprocal, rep,
round, rrshift, rshift, same, setBlock, sin, sqrt, sub, tan, tensor, transpose, fft, ifft
} from 'mathlab';
基础方法列表
Math Object functions:数学对象函数
abs | acos | asin | atan | ceil | cos | exp | floor | log | round | sin | sqrt | tan
import { abs, acos, asin, atan, ceil, cos, exp, floor, log, round, sin, sqrt, tan } from 'mathlab';
Arithmetic operations:算术运算
add | sub | mul | div | neg
import { add, sub, mul, div, neg } from 'mathlab';
Linear algebra:线性代数
dot | solve | det | inv | norm2 | tensor | eig
import { dot, solve, det, inv, norm2, tensor, eig } from 'mathlab';
Fast Fourier Transforms:快速傅立叶变换
fft | ifft
import { fft, ifft } from 'mathlab';
Utility functions:实用功能
dim | same | rep | diag | identity | random | linspace
import { dim, same, rep, diag, identity, random, linspace } from 'mathlab';
Complex:复杂矩阵
import { Complex, abs } from 'mathlab'
Sparse:稀疏矩阵
import { Sparse } from 'mathlab'
glMatrix
glMatrix是一个注重速度和高性能的向量和矩阵数学库。
- 官网:https://glmatrix.net/
- 参考文档:https://glmatrix.net/docs/index.html
- GitHub:https://github.com/toji/gl-matrix
- NPM:https://www.npmjs.com/package/gl-matrix
代码示例
import { glMatrix, mat2, mat2d, mat3, mat4, quat, quat2, vec2, vec3, vec4 } from 'glMatrix';
console.log(mat2.create()); // 创建二维矩阵
console.log(mat3.create()); // 创建三维矩阵
console.log(mat4.create()); // 创建四维矩阵
console.log(vec2.create()); // 创建Array.length === 2的数组
console.log(vec3.create()); // 创建Array.length === 3的数组
console.log(vec4.create()); // 创建Array.length === 4的数组
二维矩阵
import { glMatrix, mat2, mat2d, mat3, mat4, quat, quat2, vec2, vec3, vec4 } from 'glMatrix';
三维矩阵
import { glMatrix, mat2, mat2d, mat3, mat4, quat, quat2, vec2, vec3, vec4 } from 'glMatrix';
四维矩阵
import { glMatrix, mat2, mat2d, mat3, mat4, quat, quat2, vec2, vec3, vec4 } from 'glMatrix';
mat4.create(); // 创建矩阵
mat4.clone(a); // 拷贝矩阵
mat4.copy(out, a);
// 基础运算规则
mat4.add(out, a, b); // 加法
mat4.sub(out, a, b); // 减法 mat4.subtract(out, a, b)
mat4.mul(out, a, b); // 乘法 mat4.multiply(out, a, b)
mat4.adjoint(out, a); // 共轭
mat4.transpose(out, a); // 共轭转置
mat4.invert(out, a); // 反转
mat4.translate(out, a, v); // 平移
mat4.scale(out, a, v); // 缩放
mat4.rotate(out, a, rad, axis); // 旋转
mat4.rotateX(out, a, rad); //
mat4.rotateY(out, a, rad); //
mat4.rotateZ(out, a, rad); //
mat4.fromValues(m00, m01, m02, m03, m10, m11, m12, m13, m20, m21, m22, m23, m30, m31, m32, m33); //
mat4.set(out, m00, m01, m02, m03, m10, m11, m12, m13, m20, m21, m22, m23, m30, m31, m32, m33); //
mat4.identity(out); //
mat4.transpose(out, a); //
mat4.determinant(a); //
mat4.fromTranslation(out, v); //
mat4.fromScaling(out, v); //
mat4.fromRotation(out, rad, axis); //
mat4.fromXRotation(out, rad); //
mat4.fromYRotation(out, rad); //
mat4.fromZRotation(out, rad); //
mat4.fromRotationTranslation(out, q, v); //
mat4.fromQuat2(out, a); //
mat4.getTranslation(out, mat); //
mat4.getScaling(out, mat); //
mat4.getRotation(out, mat); //
mat4.fromRotationTranslationScale(out, q, v, s); //
mat4.fromRotationTranslationScaleOrigin(out, q, v, s, o); //
mat4.fromQuat(out, q); //
mat4.frustum(out, left, right, bottom, top, near, far); //
mat4.perspectiveNO(out, fovy, aspect, near, far); //
mat4.perspectiveZO(out, fovy, aspect, near, far); // 透视投影矩阵
mat4.perspectiveFromFieldOfView(out, fov, near, far); //
mat4.orthoZO(out, left, right, bottom, top, near, far); // 正射投影矩阵
mat4.lookAt(out, eye, center, up); //
mat4.targetTo(out, eye, target, up); //
mat4.str(a); //
mat4.frob(a); //
mat4.multiplyScalar(out, a, b); //
mat4.multiplyScalarAndAdd(out, a, b, scale); //
mat4.exactEquals(a, b); //
mat4.equals(a, b); //